
A Smarter Way to Move in Tight Spaces using ‘Flexible’ Robots
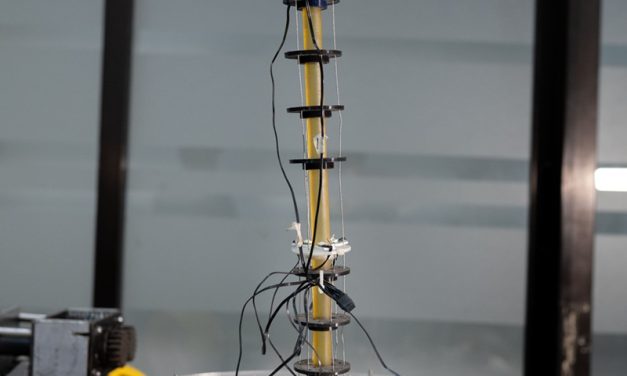
STORY CREDITS Writer: Apeksha Srivastava Photo: Arijit Reeves and the IITGN Robotics Lab team IIT Gandhinagar researchers proposed a novel framework that simplifies control in Tendon-driven Continuum Robots (TDCRs) with millimetre-level precision, unlocking their potential in areas like surgical robotics and industrial inspection and surveillance. We often imagine robots as machines with rigid arms, rotating joints and targeted mechanical movements. The famous Optimus Prime and Bumblebee from the Transformers movies appear to fit these criteria! However, such robots would be unable to function in several environments that are too confined and cramped. Imagine trying to perform a surgery inside the human body....
Read More


